






瑞士研究人員開發能夠生產3D雕塑的3D打印兩臂機器人
通過使用加熱的金屬線,3D打印機器人能夠從聚苯乙烯泡沫中雕刻出精美的模型,而無需與材料進行任何物理接觸。該技術已經產生了一系列復雜的3D原型,這些原型具有雙重彎曲的表面,而傳統的直線切割很難或甚至不可能實現。
使用熱線雕刻泡沫塑料本身并不是一種新的生產技術,但是,使用其他工具通常需要大量時間,精力來改進制造。此外,傳統的切割方法是使用直的熱線將聚苯乙烯切割成一定形狀,但是這種方法僅允許基本切割,而不能生產具有復雜幾何形狀的模型。
為此,通常將熱鋼絲鉗安裝在銑削車間的機械上,但它們也只能產生直紋的表面。 CNC機床以類似的方式使用(盡管使用鉆頭代替金屬絲),但是在考慮機床所施加的約束的同時,很難對生成所需表面的路徑進行編程。丹麥工程師在2016年的項目中進行了相關研究,該項目使用熱線切割一次掃描即可生產出雙曲面。不過,根據瑞士研究人員的說法,這種方法的局限性要求切割刀片必須保持平面,并且系統需要用戶輸入才能解決非平凡的問題。
這家位于蘇黎世的研究人員的新方法使用了名為YuMi IRB 14000的3D打印機器人,該機器人配備了兩個臂以提高處理效率。每個肢體的末端都揮舞著一根不可伸展的彈性金屬棒,其“手”以七個自由度移動,使其具有出色的靈活性。通過對機器人的附件進行編程以有效地協同工作,研究人員能夠精確地創建3D設計。
給定目標形狀后,機器人的定制軟件將生成一系列軌跡,并將其中一根桿掃過工件以進行切割。優化了軌跡,以最有效的方式移動“手”,并減小了當前工件和目標形狀之間的差異。與順序路徑規劃工具一起使用,這可以使運動完全自動化或由用戶控制。
YuMi 14000能夠執行許多精密任務 圖片來自ABB Robotics。
使用3D打印創建機器人作品
通過創建一組多樣化的仿真示例以及包括手,心,鯊魚和蜂鳥模型在內的多個物理原型,對該方法進行了評估。在測試過程中,將一個邊長為290mm的立方聚苯乙烯泡沫塊安裝在三腳架上,并在兩次切割之間手動轉動。將直徑為1mm的電線連接到6.6安培和4.6伏的電源,將其加熱到大約250℃。研究人員說,加熱金屬絲可以確保材料在接觸之前就已經熔化,并產生了使用傳統方法無法實現的表面。創建模型的時間因硬件和復雜性而異,因此更復雜的手動模型需要四個小時才能完成,而兔子模型僅需要兩個小時零二十分鐘。與相應的模擬形狀相比,兔子和心臟模型的平均平均誤差分別為1.97mm和0.76mm。研究人員將其歸結為機器人手臂缺乏剛性,以及使用三腳架安裝,這限制了其定位的準確性。
蘇黎世研究人員也承認了設計的其他限制,例如用于操縱材料的桿,該桿只能彎曲并翹曲一定的量,然后才需要更換。此外,現有的用于對機器人進行編程的軟件僅允許機器人的手臂進行一系列切割,而不能在一個坐姿中創建作品。盡管未經測試,但瑞士研究人員承認,盡管降低了切割質量,但升高的焊絲溫度仍可能導致更高的切割速度。該技術將來也可能適用于其他材料,但是目前,該技術還處于開發的早期階段,距離第一臺畢加索機器人尚有數年之遙。
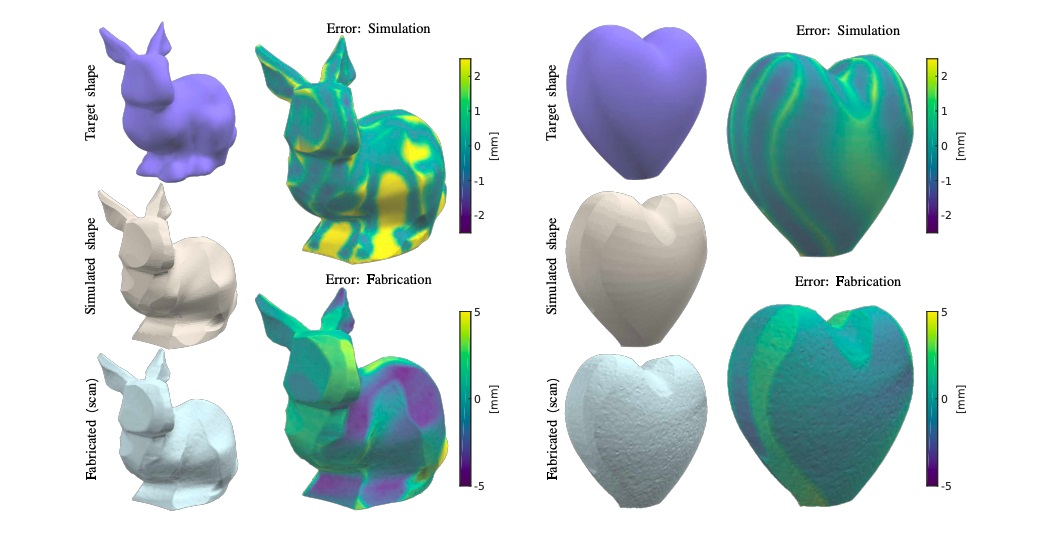
可視化表示在測試過程中產生的兔子和心臟模型中的錯誤率。圖片來自蘇黎世聯邦理工學院。
使用增材制造生產的機械臂
3D打印已被用于創建多種用途的機械臂,從用于夾持工具的生物手到完整的機械人形生物。中國的深圳粵江科技有限公司于2018年在CES上首次展示了三代3D打印DOBOT機械臂。DOBOTMagician變體與五種不同的工具頭兼容:3D打印機熱端,激光,筆架,真空杯和夾持器。
臺式機3D打印機制造商BCN3D Technologies于2016年7月發布了具有3D打印結構的開源機器人手臂。該技術是為教育目的而開發的,可以對其進行編輯,改進和更改,以適應用戶的需求,同時可在成本低。
意大利技術初創公司Youbionic在2018年11月使用增材制造技術制造了增強型人形機器人。“半人馬”設計是通過將公司一年前開發的手臂附件添加到機器人脊柱上而創建的。
(本文來源:中國3D打印網)
相關推薦
-
中國核動力研究設計院12月9日宣布,11月28日,由中國核動力研究設計院牽頭,聯合廣東...
-
再生時代報道/近日,東芝日本總部宣布,將于2025年1月1日起將其總部的23個部門重組為1...



評論交流